English
EnglishThông thường khi bạn mới mua biến tần về thì chưa được cài đặt gì cả. Để phù hoạt động phù hợp với thiết bị thì bạn cần phải cài đặt biến tần fuji ace nói riêng và các loại biến tần nói chung. Các thông số cần cài đặt như tín hiệu chạy, thời gian tăng/giảm tốc, điểm đặt tần số,…Bài viết này VPIC sẽ hướng dẫn chi tiết cho bạn.

1.Sơ lược biến tần Fuji Frenic ACE
Biến tần Fuji Frenic ACE là dòng biến tần được sản xuất bởi Nhật Bản, dòng biến tần này được trang bị sẵn tính năng tự động hóa điều chỉnh logic tiêu chuẩn.
Fuji Frenic ACE có sẵn card màn hình, fieldbus, network nhằm tối đa hóa sự linh hoạt cho biến tần. Ngoài ra biến tần này còn được trang bị chức năng an toàn STO.
2.Hướng dẫn cách cài đặt biến tần Fuji Frenic ACE
2.1.Điều chỉnh tần số và cài đặt lênh Run/Stop trên bàn phím
A.Lệnh Run/Stop F02=0
Cách đặt lệnh: bấm PRG/reset -> sử dụng phím mũi tên lên xuống tìm 1.F__ bấm Func/Data -> bấm phím lên xuống để tìm F02 -> bấm Func/Data -> sử dụng phím lên xuống đặt 0 -> bấm Func/Data để tiến hành lưu -> bấm PRG/Reset để quay lại.
B.Lệnh cài đặt tần số trên bàn phím: F01=0
Cách đặt lệnh: bấm PRG/Reset -> bấm phím lên/xuống tìm 1.F__-> bấm Func/Data để chọn -> bấm phím lên/xuống tìm F01 -> bấm Func/Data -> sử dụng phím lên/xuống đặt 0 -> bấm FUNC/Data để tiến hành lưu -> Bấm PRG/Reset để trở lại.
Thao tác thực hiện lệnh chạy: sử dụng phím lên/xuống để cài đặt tần số và sau đó bấm nút Func/Data để lưu tần số, bấm nút Run để chạy còn nút Stop thì dừng.
2.2.Điều chỉnh tần số bằng biến trở & cài đặt lệnh Run/Stop bằng terminal thiết bị bên ngoài
A.Lệnh Run/Stop: F02 = 1
Cách đặt lệnh: bấm PRG/Reset -> sử dụng phím lên/xuống tìm 1.F__-> bấm Func/Data để chọn -> bấm phím lên/xuống tìm F02 -> bấm Func/Data -> sử dụng phím lên/xuống đặt 1 -> bấm Func/Data để lưu -> bấm PRG/Reset để trở lại.
B.Lệnh lấy tần số bằng biến trở: F01=1
Cách đặt lệnh: Bấm PRG/Reset -> sử dụng phím lên/xuống tìm 1.F__-> bấm Func/Data để chọn -> bấm phím lên/xuống tìm F01 -> bấm Func/Data -> sử dụng phím lên/xuống đặt 1 -> bấm Func/Data để lưu lại -> Bấm PRG/Reset để quay trở lại.
Cách đấu biến trở: Chân giữa của biến trở nối 12. 2 chân còn lại nối 11,13. Khi mà xoay biến trở lên nếu như tần số đi xuống thì đảo 2 chân này lại cho nhau là được.
Thao tác thực hiện lệnh chạy: nối chân CM với FWD lại để chạy thuận còn nối với REV thì chạy nghịch. Xoay biến trở để đặt tần số, ngắt kết nối giữa CM và FWD hoặc là REV là để thực hiện Stop.
2.3.Cài đặt chạy thuận/nghịch
Theo mặc định thì nhà sản xuất cài đặt sẵn chân FWD là chân chạy thuận còn REV thì là chân chạy nghịch.
Nếu như kích vào 2 chân này mà không có tín hiệu RUN thì vào hàm E98 và E99 tương ứng với 2 chân FWD & REV rồi sau đó đặt giá trị 98 chạy thuận hoặc là 99 chạy nghịch. Lưu ý: để có thể chạy nghịch thì trước tiên cần phải ngắt chạy thuận trước cho đến khi động cơ ngừng hoạt động hẳn. Sau đó mới thực hiện đặt lệnh chạy nghịch để tránh tình trạng gây ra xung đột các lệnh với nhau làm hư hỏng biến tần.
Cách cài đặt lệnh: bấm PRG/Reset -> sử dụng phím lên/xuống tìm E__-> bấm Func/Data để chọn -> bấm phím lên/xuống tìm E98 hoặc E99 -> bấm Func/Data -> sử dụng phím lên/xuống đặt giá trị -> bấm Func/data để lưu lại -> Bấm PRG/Reset để quay trở lại.
2.4.Cài đặt thời gian tăng/giảm tốc
A.Thời gian tăng tốc: F07
Cách cài đặt lệnh: Bấm PRG/Reset -> sử dụng phím lên/xuống tìm 1.F__-> bấm Func/Data để chọn -> bấm phím lên/xuống tìm F07 -> bấm Func/Data -> sử dụng phím lên/xuống đặt giá trị -> bấm Func/Data để lưu lại -> bấm PRG/Reset để quay trở lại.
B.Thời gian giảm tốc
Cách cài đặt lệnh: Bấm PRG/Reset -> sử dụng phím lên/xuống tìm 1.F__-> bấm Func/Data để chọn -> bấm phím lên/xuống tìm F08 -> bấm Func/Data -> sử dụng phím lên/xuống đặt giá trị -> bấm Func/Data để lưu lại -> bấm PRG/Reset để quay trở lại.
2.5.Cài đặt tần số Max F03 Hz
Cách cài đặt lệnh: Bấm PRG/Reset -> sử dụng phím lên/xuống tìm 1.F__-> bấm Func/Data để chọn -> bấm phím lên/xuống tìm F03 -> bấm Func/Data -> sử dụng phím lên/xuống đặt giá trị -> bấm Func/Data để lưu lại -> bấm PRG/Reset để quay trở lại.
2.6.Chọn loại điều khiển động cơ F42
Số 0 điều khiển V/F không có bù trượt:
Biến tần điều khiển động cơ có điện áp & tần số theo mẫu V/F chỉ định bởi các mã chức năng.
Điều khiển này sẽ vô hiệu hóa đi tất cả các tính năng được điều khiển auto như trượt bù.
Do đó nên không xảy ra biến động đầu ra không dự đoán trước được. Điều này cho phép hoạt động một cách ổn định đầu ra không thay đổi tần số.
Số 1 điều khiển vector không có cảm biến tốc độ vector mô men động:
Để có được mô men xoắn cực đại ra khỏi động cơ thì điều khiển này sẽ thực hiện tính toán mô men xoắn của động cơ sao cho phù hợp với tải đang được áp dụng. Sau đó sử dụng nó để làm tối ưu hóa đầu ra vector điện áp & dòng điện.
Số 2 điều khiển V/F với bù trượt.
Số 3 điều khiển V/F với cảm biến tốc độ:
Đặt bất kỳ taair nào lên trên động cơ cảm ứng sẽ gây ra tình trạng trượt quay do các đặc tính của động cơ sẽ làm giảm quay của động cơ.
Dưới điều khiển V/F với cảm biến tốc độ thì biến tần phát hiện chuyển động quay của động cơ bằng việc dùng bộ mã hóa được gắn trên trục động cơ và bù lại cho sự giảm tần số trượt bằng điều khiển PI để sao cho phù hợp với quay động cơ với tốc độ tham chiếu.
Việc này giúp cải thiện được độ chính xác điều khiển tốc độ của động cơ.
Số 4 điều khiển V/F với cảm biến tốc độ và tự động tăng mô men xoắn:
Sự khác nhau so với điều khiển V/F và cảm biến tốc độ được nêu ở phía trên là tính toán mô men xoắn động cơ phù hợp với lại tải được dùng để tối ưu hóa đầu ra cho vector điện áp & dòng điện để có thể nhận được mô men xoắn cực đại ra khỏi động cơ.
Điều khiển này sẽ hiệu quả điều giúp cải thiện được phản ứng hệ thống dối với lại các nhiễu ở bên ngoài như là dao động tải, độ chính xác kiểm soát tốc độ động cơ.
Số 6 điều khiển vector cho động cơ cảm ứng với cảm biến tốc độ:
Điều khiển này sẽ yêu cầu PG tùy chọn bộ tạo xung và thẻ giao diện PG tùy chọn được gắn ở trên động cơ trục và một biến tần tương ứng với nó.
Biến tần sẽ phát hiện vị trí và tốc độ quay của động cơ theo PG phản hồi lại tín hiệu và dùng chúng điều thực hiện việc điều khiển tốc độ.
Và sau đó nó cũng sẽ phân hủy dòng truyền động cơ thành động cơ các thành phần dòng mô men xoắn điều khiển từng thành phần trong vector.
Số 15 điều khiển vector cho động cơ đồng bộ không có cảm biến tốc độ cục bộ cảm biến vị trí:
Điều khiển này sẽ thực hiện ước tính tốc độ của động cơ dựa vào điện áp đầu ra của biến tần và dòng điện để sử dụng ước tính tốc độ kiểm soát tốc độ.
Và sau đó nó cũng sẽ phân hủy dòng điện dẫn động cơ thành dòng điện kích thích mô men xoắn các thành phần và điều khiển từng thành phần đó trong vector.
Không cần thẻ giao diện PG bộ tạo xung vẫn có thể đạt được phản hồi mong muốn bằng cách điều chỉnh các hằng số điều khiển PI băng việc dùng tốc độ điều chỉnh bộ điều khiển PI.
Cách cài đặt lệnh: bấm PRG/Reset -> sử dụng phím lên/xuống tìm đến 1.F__-> bấm Func/data để chọn -> bấm phím lên/xuống tìm F42 -> bấm Func/data -> sử dụng phím lên/xuống đặt giá trị -> bấm Func/data để lưu lại -> bấm PRG/Reset để quay trở lại.
2.7.Cách reset khôi phục về chế độ mặc định H03 = 1
Cách cài đặt lệnh: bấm PRG/Reset -> sử dụng phím lên/xuống tìm 1.H__-> bấm Func/Data để chọn -> bấm phím lên/xuống tìm H03 -> bấm Func/data -> sử dụng phím lên/xuống đặt giá trị 1 -> bấm Func/data để lưu lại -> bấm PRG/Reset để quay trở lại.
2.8.Cài đặt chế độ dừng động cơ H11
Số 0 động cơ sẽ dừng theo thời gian giảm tốc độ.
Số 1 động cơ sẽ dừng theo quán tính của máy móc tải, công cơ và tổn thất động năng.
Cách cài đặt lệnh: bấm PRG/Reset -> sử dụng phím lên/xuống tìm H__-> bấm Func/data để chọn -> bấm phím lên/xuống tìm H11 -> bấm Func/data -> sử dụng phím lên/xuống đặt giá trị -> bấm Func/data để lưu lại -> bấm PRG/reset để quay trở lại.
2.9.Cách nhập thông số động cơ cài đặt biến tần fuji ace
Số cực mô tơ.
Cách cài đặt lệnh: bấm PRG/Reset -> sử dụng phím lên/xuống tìm 1.P__-> bấm Func/Data để chọn -> bấm phím lên/xuống tìm P01 -> bấm Func/data -> sử dụng phím lên/xuống đặt giá trị -> bấm Func/data để lưu lại -> bấm PRG/Reset để quay trở lại.
Công suất mô tơ P02 KW.
Cách cài đặt lệnh: bấm PRG/Reset -> sử dụng phím lên/xuống tìm 1.P__-> bấm Func/data để chọn -> bấm phím lên/xuống tìm P02 -> bấm Func/data -> sử dụng phím lên/xuống đặt giá trị -> bấm Func/data để lưu lại -> bấm PRG/Reset để quay trở lại.
Dòng điện định mức mô tơ P03 A
Cách cài đặt lệnh: bấm PRG/Reset -> sử dụng phím lên/xuống tìm 1.P__-> bấm Func/data để chọn -> bấm phím lên/xuống tìm P03 -> bấm Func/data -> sử dụng phím lên/xuống đặt giá trị -> bấm Func/data để lưu lại -> bấm PRG/Reset để quay trở lại.
Dòng không tải P06 A.
Cách cài đặt lệnh: Bấm PRG/Reset -> sử dụng phím lên/xuống tìm 1.P__-> bấm Func/data để chọn -> bấm phím lên/xuống tìm P06 -> bấm Func/Data -> sử dụng phím lên/xuống đặt giá trị -> bấm Func/data để lưu lại -> bấm PRG/reset để quay trở lại.
2.10.Điều khiển quạt làm mát H06
Số 0 quạt sẽ luôn hoạt động.
Số 1 quạt sẽ hoạt động khi RUN biến tần.
Cách cài đặt lệnh: Bấm PRG/Reset -> sử dụng phím lên/xuống tìm 1.H__-> bấm Func/data để chọn -> Bấm phím lên/xuống tìm H06 -> bám Func/data -> sử dụng phím lên/xuống đặt giá trị -> bấm func/data để lưu lại -> bấm PRG/Reset để quay trở lại.
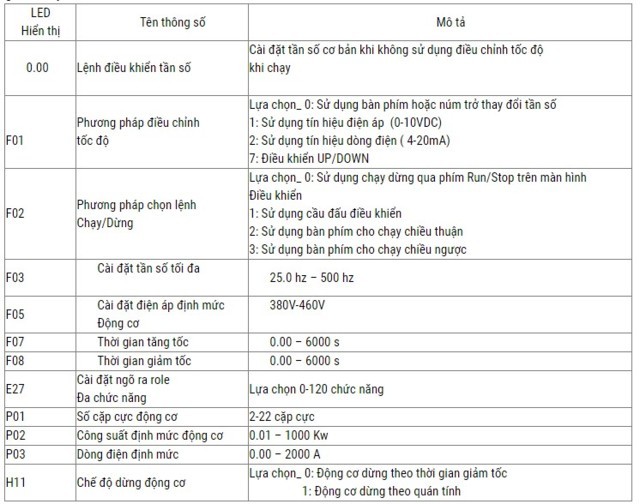
3.Các thông số cài đặt biến tần fuji ace cơ bản